paper no: rob1
last update: 27/05/08
SELF LEARNING SYSTEM FOR ROBOTS
Introduction:
Motivation for the Paper:
The recent resurgence of interest in neural networks has its root in the recognition that the brain performs computations in a different manner than do conventional digital computers. Computers are extremely fast and precise at executing sequences of instruction that have been formulated for them. A human information processing system is composed of neurons switching at speeds about a million times slower than computer gates. Yet, humans are more efficient than computers at computationally complex tasks such as speech understanding. Moreover, not only humans, but even animals, can process visual information better than the fastest computer.
Statement of NEURO PILOT:
The NEURO PILOT is a simulator or software used to control the activities of a robot pilot based on Artificial Neural Network. This robot perceives the information given to it and then acts accordingly.
To make the pilot to do so it uses backpropogation algorithm (discussed further) and the winner take all group. This NEURO PILOT when implemented with its hardware and the situation it may be effectively trained and tested as did in the software. The results were displayed in the following sections. This implementation is done in C language and the exe file is created for the verification of the software. The main aim of this project is to minimize the error value encountered at the output and to make the network to behave 100% accurate.
Artificial Intelligence – The backbone of Modern Era :
Artificial intelligence is the process of creating machines that can act in a manner that could be considered by humans to be intelligent. This could be exhibiting human characteristics, or much simpler behaviors such as the ability to survive in dynamic environments. To some, the result of this process is to gain a better understanding of ourselves. To others, it will be the base from which we engineer systems that act intelligently. In either case, AI has the potential to change our world like no other technology.
In its infancy, researches of AI over-promised and under-delivered. The development of intelligence systems in the early days was seen as a goal just in reach, though this never materialized. Today, the claims of AI are much more practical. AI has been divided in to branches, each with different goals and applications.
The problem with AI is that technologies that are researched under the umbrella of AI become common once they are introduced into mainstream products and become standard tools. For example, building a machine that could understand human speech was once considered an AI task.
Now the process that includes technologies such as neural networks and Hidden Markov Models are commonplace. It's no longer considered AI. Rodney Brooks describes this as “the AI effect”. Once an AI technology becomes utilized, it's no longer AI. For this reason AI acronym has also being coined “Almost Implemented,” as once it's done it's no longer magic, it's just common practice.
Such an idea was the motivation in creating an artificial neural robot as an pilot named NEURO PILOT.
The Biological Perspective of Neural Networks:
Neural networks are very simple implementations of local behavior observed within our own brains. The brain is composed of neurons, which are the individual processing elements neurons are connected by axons that end at the neuron in the synapse. The synapse is responsible for relaying a signal to the neuron. Synapse can
be either inhibitory or excitory
.

NEURO PILOT Architecture:
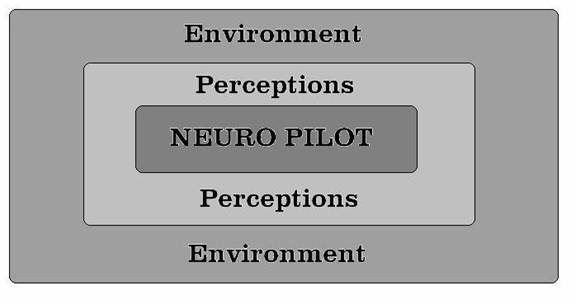
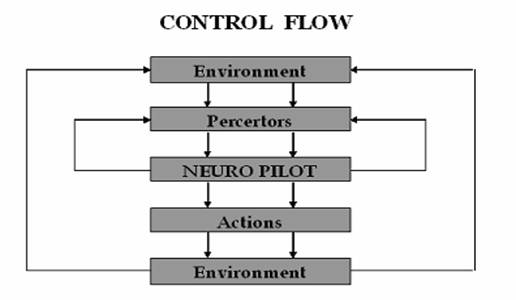
The NEURO PILOT Basic Structure:
This NEURO PILOT percept the information from the environment so that the basic block diagram of our NEURO PILOT looks as below.
Winner-Take-All Group:
For the NEURO PILOT agent, we'll look at another architecture called the “winner-take-all” network. Winner-take-all architecture are useful where inputs must be segmented into one of several classes (see in following fig).
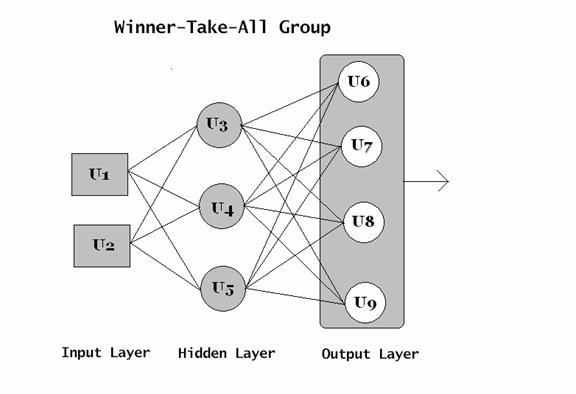
In the winner-take-all networks, the output cell with the highest weighted sum in the “winner” of the group and is allowed to fire. In our applications, each cell represents a distinct behavior that is available to the robot in the airplane.
Example behaviors include inform to the superiors, fly, failed, information to passengers etc. The firing of a cell within the winner-take-all group causes the robot to perform the particular behavior. When the robot is allowed to perceive the environment, the process is repeated as described.
For Further more download pdf...
|







